Hello I'm
Muhammad Umar
I am an Erasmus Mundus Scholar and Master's student in Intelligent Field Robotic Systems (IFRoS). The joint master program is taught at Universitat de Girona, Spain and Eötvös Loránd University, Budapest. I am currently working as a Master's Thesis Student at Eurecat Technology Center, Barcelona on ground robotic systems. My research topic is vision based reactive navigation for agricultural robotics applications. I am passionate about space robotics and my ultimate goal is to work with a space program and revolutionize the space industry by bringing innovation through a mix of robotics and AI
Projects
Package Delivery Robot using AgileX Scout Robot
Frontier-Based Exploration using Hybrid-A* Planner
EKF-SLAM using Corner Features

Object Recognition using PyTorch in ROS
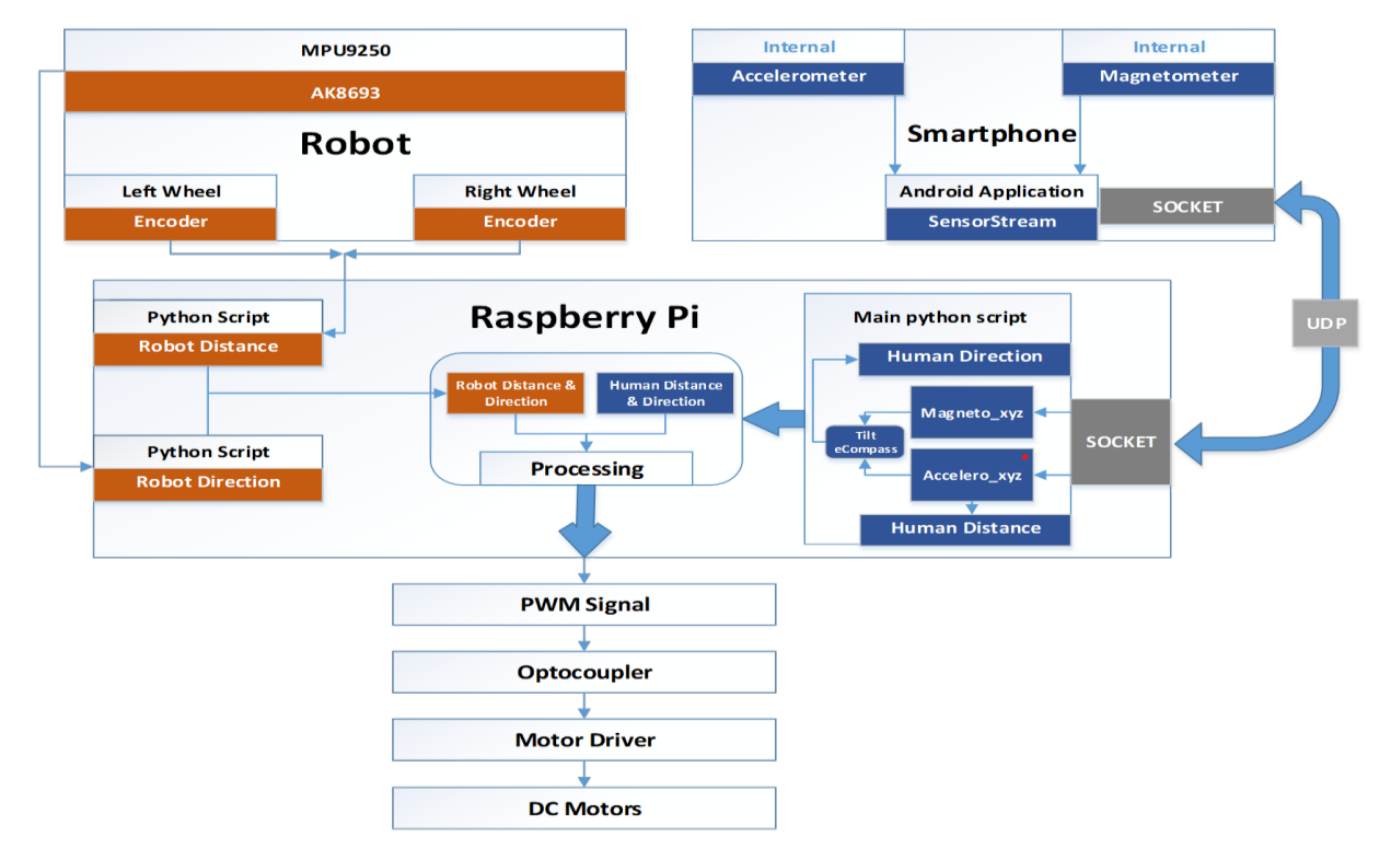
TRACK-E: Smartphone's IMU-Based Human Following Robot (Bachelor's Final Year Project)
Stereo Vision: Matching and Display
- Naive Stereo Matching
- Dynamic Programming
- OpenCV's StereoSGBM
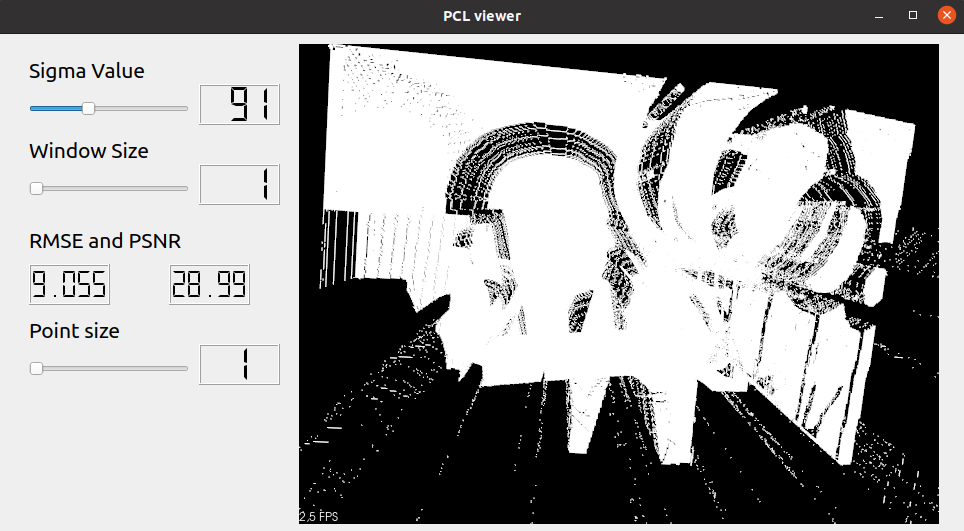
Image Filters using Point Cloud Library with QT5/VTK GUI
- Bilateral Filter
- Bilateral Median Filter
- Joint Bilateral and Joint Bilateral Median Filter
- Joint Bilateral Upsampling and Joint Bilateral Median Upsampling
- Iterative Upsampling
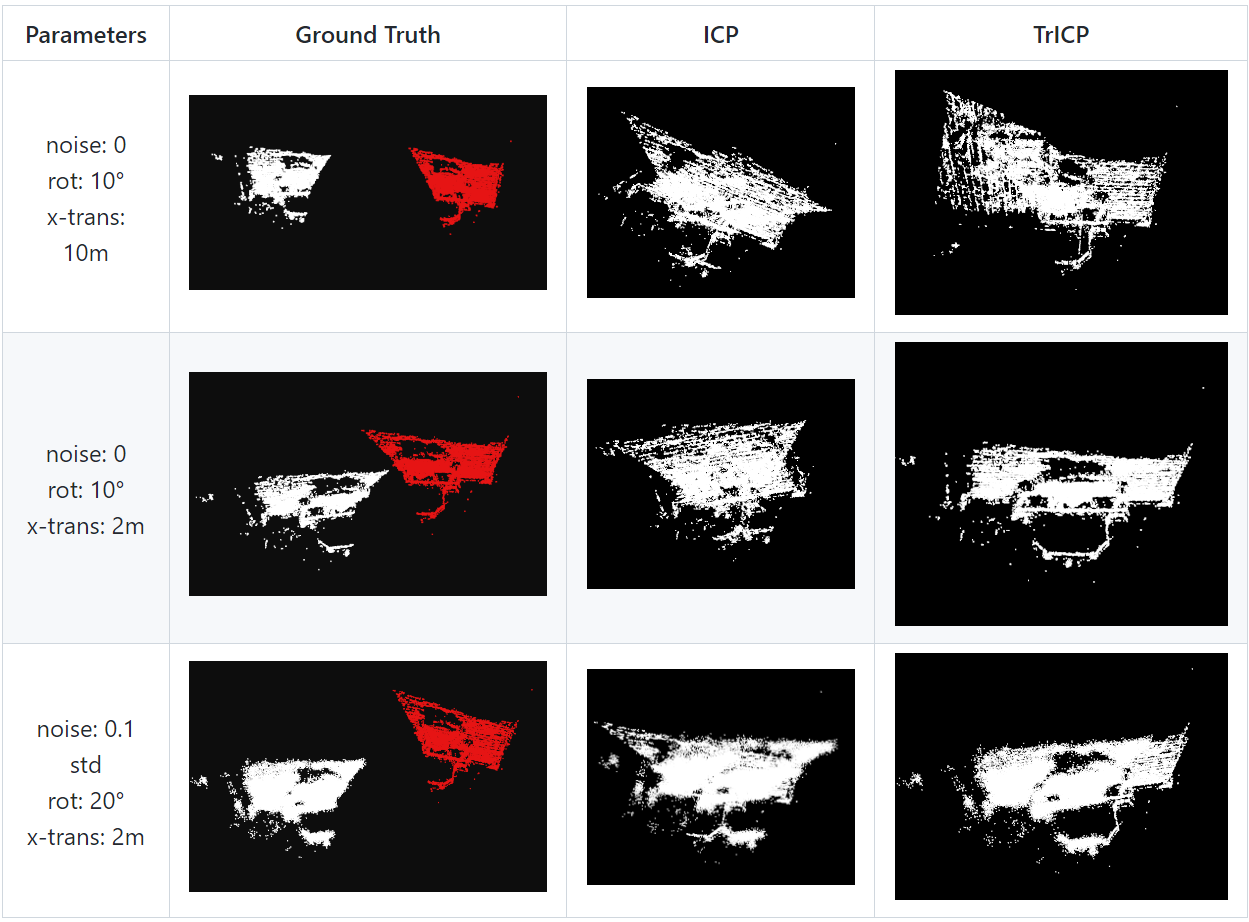
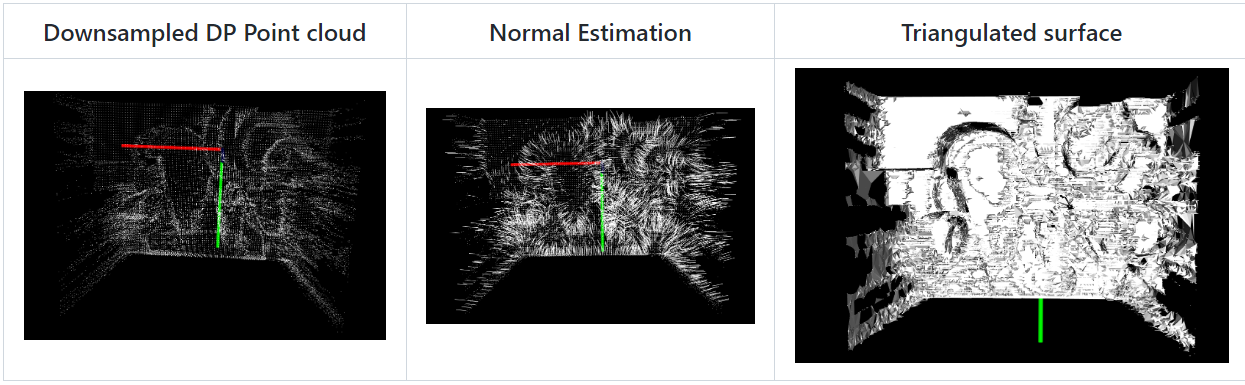
PointCloud Reconstruction using ICP and TrICP
- Nearest Neighbour search (kd-trees using nanoflann)
- Rotation Estimation (using SVD)
- Iterative Closest Point (ICP)
- Trimmed Iterative Closest Point (TrICP)

Deep Learning Projects
- Using PyTorch and Transfer Learning trained an image classifier on fruits-360 dataset with VGG16
- Fine-tuned Mask R-CNN on custom dataset (sunflowers) for segmentation.
- Implemented encoder architecture and fine-tuned encoder-decoder on COCO image captioning dataset.
Research Work
Skills
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
